In the last post we went over basic mechanics commonly seen in 3d printers. This post we will be looking into popular kinematics systems and which can be of best use for me. These different kinematic systems greatly define how they are constructed and their advantages and disadvantages. Keeping my design goals in mind, there are 3 types of kinematics I want to detail, Direct Cartesian, CoreXY, and Delta.
I talk a bit about the style of extruder in this post. I will be writing a post soon (here’s that post) explaining the difference between a Bowden Extrusion system and a Direct Drive system.
Direct Cartesian
This direct Cartesian style of kinematics is definitely the most common style of 3d printer out there. It is very straight forward to understand and use, making it very friendly to work with. This kinematics style was initially popularized by the Prusa i3 and is commonly seen in consumer 3d printers.
Advantages
- Direct and obvious
- Tried and Tested
- Tons of community support
- Easy to track down print errors
- Lots of customization and upgrades
Since this design features very obvious control, it’s not hard to program and understand. This method is very common in the community so there is a lot of support and assistance out there for it. This method has been tried and tested, making it a very safe bet for a decent printer.
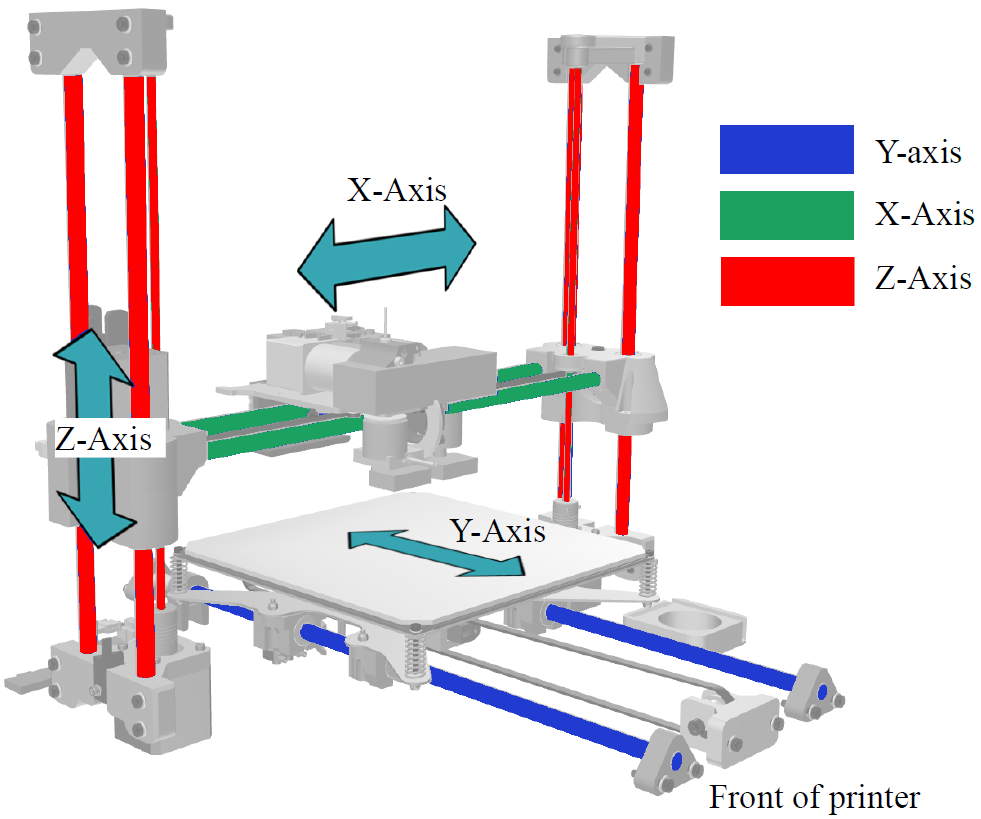
The simple design lends itself to be easily controlled, 2 lead screws for the Z axis assembly and 2 separate belt driven systems for the X and Y axis. Because everything is so separate, any print quality errors are very quick and easy to hunt down and tweak. This makes it super easy to dial in, making it quick to get up and running. There are also alternative designs out there for smaller design packages that are a little less bulky.
Parts are straight forward to replace, allowing the ability to customization and upgrade. Since this printing style is extremely common, there are a ton of YouTube videos and forum posts detailing any problems you might have or explaining various upgrades or explaining how to install various parts. Not only this, but many parts are developed just for these kinds of printers. When making a custom printer, you can use any parts you want, but when some products are developed specifically for the more mainstream printers like the Prusa i3 or the Ender 3d, it makes it easy to take these parts and just apply them to our printer since they operate the same.
Disadvantages
- Sliding print bed is an inefficient use of space
- Sliding print bed moves the part
- Z Axis drives a heavy load
- 1 Motor on a belt driven system
One of the biggest disadvantages to this style of printer is the moving print bed. This makes the printer take up more space since the bed needs space to shift back and forth completely. This relatively inefficient use of space is a big drawback for me. The bed moving is also a concern, as that means the part itself is shifting back and forth, so printing fragile elements or flexible filaments could prove quite difficult.
While each axis drives a relatively moderate amount of weight, the Z axis has to drive the entire X gantry. This includes the X gantry stepper motor and if you decided to get a direct drive system as opposed to a bowden style extruder, that’s an extra system with a stepper motor to move around. This means that you will usually see 2 stepper motors driving this axis to balance the strain that would be put on a single motor. All that extra weight means that there may be inaccuracies in the print as you have to rapidly accelerate and decelerate that mass. We are also using a belt system to drive the X axis that only takes advantage of a single stepper motor. This may not seem like a direct disadvantage at first, but the next printer designs will show the benefits of using multiple motors.
My Thoughts
These printers are great, they are super straight forward and easy to use and understand. They are great for beginners, like myself, so it would definitely be a much more straightforward build, especially with all the community support and knowledge. Since it’s so popular, many upgrades or custom systems get designed specifically for this style of printer. Although these upgrades aren’t hard to put on another printer, they are easier to find complete sets for these styles of printers first. Direct Cartesian is tried and tested, making it very safe. I really don’t like how space inefficient this style is, I don’t have a ton of space and I would like to put this printer on my desk and utilize as much of that space as I can. I’m really not a fan of the Z axis gantry moving all that weight, it seems like it causes a lot of problems in print quality. I also really don’t like the shifting bed, it’s a lot of weight to move quickly back and forth and can affect the quality of the print significantly.
CoreXY
CoreXY is a relatively new style of kinematics dating back to 2011-2012 that is commonly used in CNC and computer fabrication. It is a Cartesian style of motion but with its own unique elements. This system is relatively common and gaining ground, but due to its more complex system it may be a bit daunting for an intro level printer. This print style has been greatly popularized by the Hypercube 3d printer created by youtuber Tech2c.



Advantages
- More “complicated” mechanics
- Quicker than standard Cartesian types without the problems
- 2 Motors balancing the load
- Z gantry carries less weight
- Efficient Use Of Space
- Customization
So the mechanics of the CoreXY system is pretty clever and although it looks more complicated, it’s pretty straight forward once you get your head wrapped around it. CoreXY has a great and concise website that explains the mechanics, but I will cover it briefly here. Here is a great video explanation.
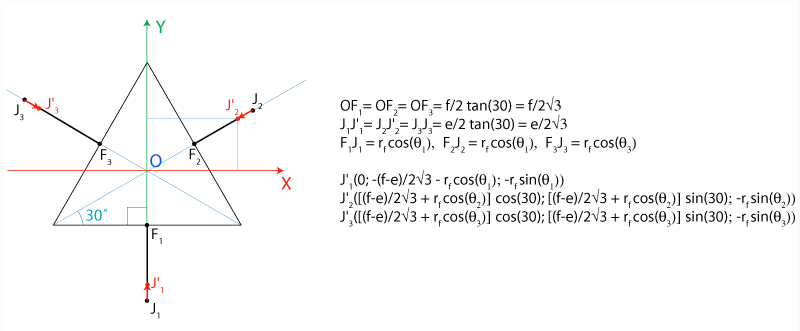
If you were to rotate the red belt’s motor clockwise, following the belt, you would simultaneously pull the load pull the X gantry towards the motor and the load to the left while also feeding the exact amount of slack from the belt to the top of the X gantry and the right side of the load, applying a force left and down. Therefore, with the red belt we can move the load diagonally from the bottom left to the top right by rotating the motor either direction. But since there is the symmetrical and separate connection of the blue belt, we can then use that blue belt to move the load diagonally from the bottom right to the top left. With coordination of both the motors we can move the load in what ever direction we want. The equations and diagram are above. It’s not that hard to understand once you wrap your head around how the mechanics move, and is actually quite simple in totality.
Because the CoreXY system has all motors mounted and are not being moved by other motors (excluding a direct drive extruder) the load is significantly lighter. This means we can move the print head load significantly quicker and more precise than a Direct Cartesian style of kinematics. This is the greatest advantage of the CoreXY system, as this solves a lot of the overshooting problem of belt driving a heavy load, alleviating possible printing errors while simultaneously balancing the load between two motors rather than one. This all helps create a higher quality print.
With the X and Y axes covered, the Z axis has a very simple job of just raising up and down. I love this because the print moves very little as the extruder does its thing. This is much easier to drive since the only weight on this system is the bed of the printer and the print itself. Significantly less than the moving load and assembly of the Direct Cartesian style of printer.
All of these axes working together significantly increases space efficiency. All systems are self contained so they don’t have any extensions out into space, they move within themselves. With this, you can keep everything contained in a simple cube frame.
There are plenty of upgrades and customization possible for this system. This starts to become a detriment at some point (see below), but the ability to chose in this flexible system is very liberating.
Disadvantages
- More “complicated” mechanics
- Has to be properly aligned and square
- Printer bed leveling
The more complicated mechanics do prove for a more detailed set up and technically more difficult programming to direct the printing head in X or Y. The system still is not very tough and is a solution more clever then complicated. One of the more important stipulations with a CoreXY system is the frame that the motors and belts are attached to has to be very square and symmetrical. Should there be some mild inaccuracies, that will reflect in the accuracy of the print, skewing dimensions. Ensuring things are exactly in line and level is very important.
Leveling the print bed is always an important topic, but can be especially troublesome with a CoreXY’s Z axis. This is typically done with a number of lead screws. One allows for a straightforward hanging print bed, but will end up becoming a bit tilted down over time. This can be solved then by putting 2 lead screws across from one another. This is a viable option with enough support, but can still be improved. Since 3 points are needed to define a plane, 3 lead screws would allow you to properly constrain the rotation of the bed. 4 would work symmetrically and would be very understandable to work with and allow another point of constraint. 4 is pushing it at this scale, so anything above this would be unnecessary. More moving parts means more hardware to pay for, to maintain, and to calibrate. The problem then is how do you drive these lead screws? Once you pick an amount of lead screws to use, should you drive each with its own stepper motor? Should you link them together with a belt? Then another belt and pulley system is introduced that must be maintained.
My Thoughts
I just like really love the mechanics behind this one. CoreXY is a really great solution to moving a load. Basing everything on a belt system isn’t the greatest thing, but doable so long as you keep up with it. Making sure everything is extremely level and square is important so you have to make sure to use proper tools to ensure clean and even cuts. The problem of solving the Z axis assembly is also concerning. This requires more research to determine what the best solution would be. I do like how quickly this printer can work. Having the 2 motors working together is really beneficial. I can upgrade and customize this printer just as much as a Direct Cartesian, which is good, lots of options.
Delta
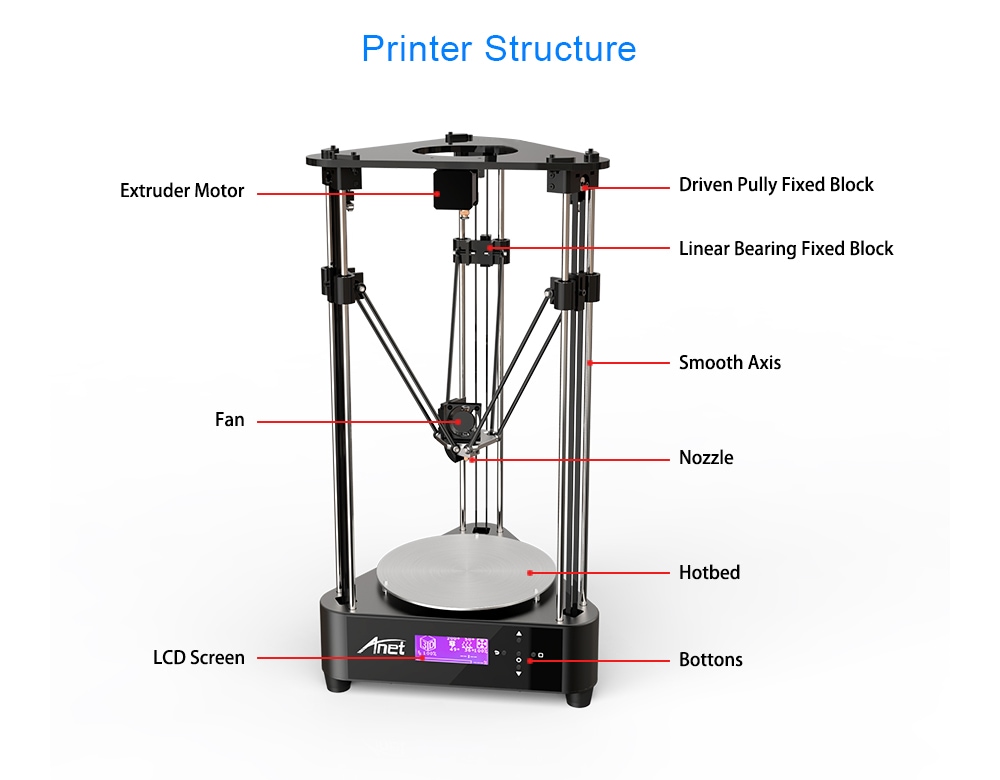
Invented in the early 1980s, this style of motion is considerably more complicated than the other styles of kinematics. A Delta style printer uses 3 vertically sliding arms that are all connected to the print head to swing it back and forth across the print bed. As opposed to working in just the X,Y, or Z axes, the Delta uses a complex coordination of trigonometry to determine its position in space. It’s very mesmerizing to watch the arms of this printer work in perfect unison.
Advantages
- Extremely fast
- Accurate
- Lightweight
- Instant change of direction
- 3 Motors balancing the load
- Prints tall, round objects very well
- Stationary print bed
I’m not going to take the time to learn how the equation balance out for the Delta and I won’t embarrass myself trying. Delta kinematics is much wider than just 3d printers and for a good reason. They are quick. Like really quick. Because this system utilizes all 3 stepper motors at a time to move the print head, the mass is balanced between all of the motors. This allows them to all work together in perfect unison, making instant changes in direction. Although the CoreXY style uses 2 motors together, they only work with one another in proportion to the angle it is moving in, so all 3 of these in perfect unison is a big upgrade. Watching one of these things crank out a vase is pretty impressive. Just watch this person push their printer to print at an absurd speed of 350mm/sec.
Keeping this in mind and realizing each motor drives a simple assembly very directly up and down, this method proves to be quite accurate as well. With all three motors working in tandem with one another this system creates accurate and precise prints in less time than other printers. The entire assembly is rather sparse and lightweight, making this printer easy to move around and maintain.
Because of its circular and vertical nature, this printer tends to excel in printing taller and/or rounder objects. It doesn’t falter printing other styles of shapes, but is just naturally good at those specifics. The static print bed is also a nice feature. The print doesn’t have to move at all, making it easier to ensure a level bed and quality print.
Disadvantages
- Complicated equations
- Harder to pinpoint printing errors
- More complicated hardware
- Inefficient use of space
- Low weight print head
- Circle print bed
It’s not too hard to determine that it’s complicated to compute the motion for a delta printer. Having these more complicated equations ends up being a significant factor when it comes to computing them. Because significantly more data has to be calculated, ensuring the motherboard is 32 bit rather than a dated 8 bit or standard 16 bit controller is important to ensure accuracy in the print. These complicated movements, despite their benefits, do make it harder to track down specific print errors. Where it is very simple to see print errors on a Cartesian style printer since all the axes are separate, the integrated movement of the Delta printer makes this a little more tough.
The hardware isn’t that much more complicated, but the extra arms and ball joints to ensure fluid motion is important to keep in mind as they are another part that has to be maintained and very important fixture in the movement. Because of these hanging arms, a Delta printer is relatively space inefficient. These printers are tall and the arms typically take up nearly half of the vertical space in these printers.
One of the bigger restrictions we see is the weight of the print head. To benefit from it’s high speeds, not a lot of mass can be put on the print head. It definitely has the power to do it, but the jerk from quick the acceleration will introduce some serious print errors, effectively putting a cap on the speed. Not only this, but the Delta has a more narrow print base, making it more unstable than its Cube frame counterparts. Because of all of this, you will commonly see Delta printer’s with a Bowden style extrusion system to reduce weight from the load.
Although the print bed is stationary, which is a great benefit, the fact that it is circular ends up being problematic depending on what you’re looking to print. If you want to print round things, it works good, but if you are looking to print more industrial things like parts and pieces, those are more square, so the circular bed becomes inefficient. Depending on what you’re looking to print, the print bed start to restrict your respectable printing dimensions.
My Thoughts
Delta is really cool. The high speed and accuracy is a huge benefit. Being able to crank out parts would be really amazing. Although its relatively inefficient in space, that’s all mainly vertical space, which I have plenty of. Getting a 32 bit board really isn’t hard, either. They are becoming more standard right now so they aren’t hard to find for relatively cheap. I am a big fan of having the 3 motors bear the load of the printing end. My biggest concern for this printer is upgrades. The delta puts quite a few restrictions on itself, giving it s soft upper limit. Like I said in my design goals, I want to do this right the first time, but that doesn’t mean dropping boat loads of money to get the best quality printer, but rather getting something that is good and proper and planning the ability to experiment and upgrade.
Final Thoughts
All in all, each printer is a great design with it’s own benefits in different situations. I think overall, I like the CoreXY system the most. Not only do I love how the mechanics work, I love how it is a very clever method of moving in the X and Y in a single integrated system. Since this method was originally developed for CNC and computer fabrication, a CoreXY system can very easily be used then for CNC purposes, laser engraving, laser cutting, etc. Many makers have done this before and its very easy to find examples using other tools. Yes, you can do this with other methods, but this one is pretty damn good. There are many professional CNC machines as well as printers that use this method, so it’s gotta be a good design.
Although I have detailed the problems with timing belts, I am very aware of them and so long as I use good enough parts and properly maintain and dial them in, I will be fine. I have plenty of room to upgrade here too, which is great. I can mess with more experimental systems that are easier to install and work with on an adaptable system than one that is a little more specific. This flexibility in a robust design makes this printer a fantastic option for me. Also have I said how cool it is. Ugh the belts look so cool.
Not that I have a Kinematics system that fits my needs I will keep moving on with the design process in greater detail. Some things to discuss next are how to drive the Z axis, since that’s a bit of a design choice, as well as start talking about what kind of materials I will be using, and start going into detail about the extruder. Admittedly I have already ordered a lot of the parts I need but am still figuring out how everything will be going together. I am struggling with dimensions for the printer, but will be nailing that down in the coming weeks. I will also be going through everything I have ordered in sections and covering each portion of the printer. More updates and research coming next!
Sources
- Blog. (2018, April 27). VellemanStore. Retrieved December 15, 2019, from https://www.vellemanstore.com/en/blog/delta-vs-cartesian-which-3d-printer-is-best-for-you/
- Delta versus Cartesian 3D printing technology ▶ Which Is Really Better? Tractus3D. Retrieved December 15, 2019, from https://tractus3d.com/what-is-3d-printing/3d-printing-technology/
- Grames, E. (2019, October 6). CoreXY 3D Printer: Why It Makes a Difference. All3DP. Retrieved December 15, 2019, from https://all3dp.com/2/corexy-3d-printer-is-it-worth-buying/
- Jorgenson, L. (2017, November 15). How to Choose Between Cartesian and Delta 3D Printers. Fargo 3D Printing. Retrieved December 16, 2019, from https://www.fargo3dprinting.com/choose-cartesian-delta-3d-printers/
- Moyer, I. E. Cartesian Motion Platform. CoreXY. Retrieved December 15, 2019, from https://corexy.com/
- CoreXY explained: Comparison + strengths & weaknesses (2019, November 18). YouTube. YouTube. Retrieved December 15, 2019, from https://www.youtube.com/watch?v=_ramiM3KHYE
- Yusef, B. (2015, November 10). 3D Printers Explained: Delta, Cartesian, Polar, Scara. All3DP. Retrieved December 15, 2019, from https://all3dp.com/know-your-fdm-3d-printers-cartesian-delta-polar-and-scara/

4 Replies to “3d Printer | Build Log 4 | Kinematics”